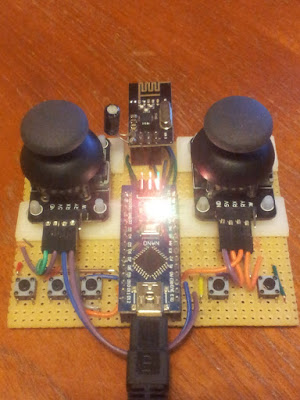
Accessing quadcopter memory over radio The usual method of controlling quadcopters is to transmit a train of PPM signals from a radio transmitter, measure the length of the individual pulses on a microcontroller, via a radio receiver . As part of my DIY ethos, and as a learning exercise, I have made the above controller with an nrf24l01 moduled and an Arduino Nano. In a nutshell, the Arduino Nano captures the 2D joystick positions, used for yaw, throttle, pitch and roll, and the button presses. A data packet is then sent by radio to the Quadcopter. In fact there is a more powerful implementation going on. What is interesting is how the controller sends data to the Quadcopter - it actually manipulates the memory directly on the Quadcopter AVR - how does it do that? Well, first of all the Quadcopter defines the memory addresses that the controller has access to by setting recording a pointer to the desired variable - note that the cast means...