PS2 controller as a radio controller!

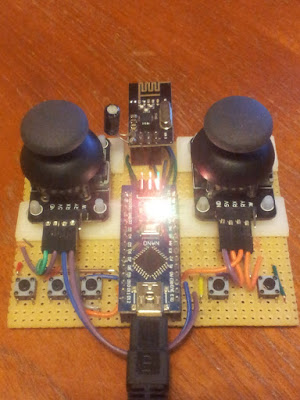
Turning a PS2 controller into a wireless radio controller with Arduino Mini and an nRF24l01 radio module I have previously described a project to transmit PS2 controller signals by radio . The project featured an Arduino Nano that read the PS2 signals and transmitted them with an nRF24l01 module. Recently I have been inspired to incorporate the battery, charging circuit and Arduino right into the controller - heavily inspired by this project here: